
Pengfei Lin (林 鵬飛)
I am currently a Postdoctoral Researcher at Tsukada Lab, The University of Tokyo, where I work with Prof. Manabu Tsukada, researching autonomous vehicles, motion planning, optimization control, etc. Before that, I obtained my Ph.D. at the Dept. of Creative Informatics, Graduate School of Information Science and Technology, The University of Tokyo from 2021.04 to 2024.03. I did my M.S. at the Dept. of Electrical Engineering, Hanyang University from 2018.09 to 2021.02. I finished my B.S. at the School of Automation, Northwestern Polytechnical University from 2014.09 to 2018.06.
Email: linpengfei0609[at]gmail.com
News
Research Projects

This research project is to develop an open EV platform for Level 3 autonomous navigation based on sensing, control interface specifications, protocols, and in-depth learning AI-based decision-making, control algorithms, and diffusion and verification service technologies using it.
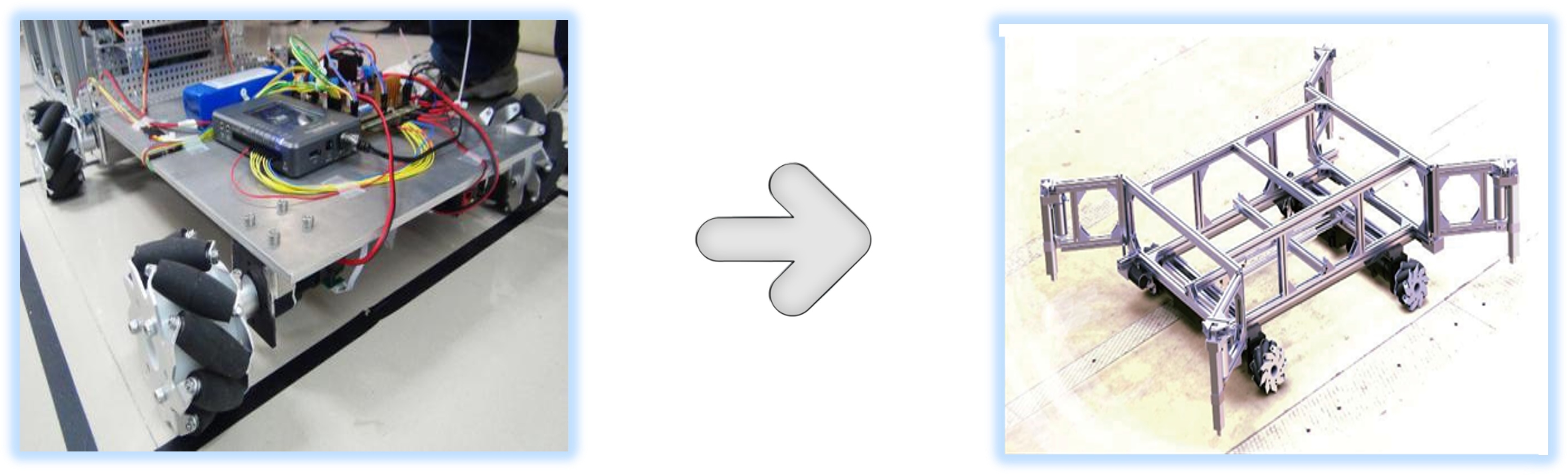
This research project aims to develop an omnidirectional composite mobile platform, learning the mechanical structure of the Mecanum Wheel, improve the stability of the mobile platform under different loads and improve the adaptability of the platform to complex terrain.
Publications
I'm interested in developing planning algorithms for autonomous vehicles via model predictive control, potential function, clothoidal curve, etc.
Conference Papers:
- Keep Calm and Cross: Smart Pole Interaction Unit for Easing Pedestrian Cognitive Load
V. Chauhan, C.-M. Chang, E. Javanmardi, J. Nakazato, K. Toda, Pengfei Lin, T. Igarashi, M. Tsukada,
IEEE World Forum on Internet of Things (IEEE WFIoT) 2023 | paper | Aveiro, Portugal - Potential Field-based Path Planning with Interactive Speed Optimization for Autonomous Vehicles
Pengfei Lin, E. Javanmardi, J. Nakazato, and M. Tsukada
Annual Conference of the IEEE Industrial Electronics Society (IECON) 2023 | paper | Marina Bay Sands Expo and Convention Centre, Singapore - Occlusion-Aware Path Planning for Collision Avoidance: Leveraging Potential Field Method with Responsibility-Sensitive Safety
Pengfei Lin, E. Javanmardi, J. Nakazato, and M. Tsukada
IEEE International Conference on Intelligent Transportation Systems (ITSC) 2023 | paper | Bilbao, Spain - Time-To-Collision-Aware Lane-Change Strategy Based on Potential Field and Cubic Polynomial for Autonomous Vehicles
Pengfei Lin, E. Javanmardi, Y. Tao, V. Chauhan, J. Nakazato, and M. Tsukada
IEEE Intelligent Vehicles (IV) Symposium 2023 | paper | Alaska, USA - zk-PoT: Zero-Knowledge Proof of Traffic for Privacy Enabled Cooperative Perception
Y. Tao, Y. Jiang, Pengfei Lin, M. Tsukada, and H. Esaki
IEEE Consumer Communications & Networking Conference (CCNC) 2023 | paper | Las Vegas, USA - Adaptive Potential Field with Collision Avoidance for Connected Autonomous Vehicles
Pengfei Lin, and M. Tsukada
IEEE Asian Control Conference (ASCC) 2022 | paper | Jeju Island, Korea - Cooperative Path Planning Using Responsibility-Sensitive Safety (RSS)-based Potential Field with Sigmoid Curve
Pengfei Lin, and M. Tsukada
IEEE Vehicular Technology Conference (VTC) 2022 | paper | Helsinki, Finland - Model Predictive Path-Planning Controller with Potential Function for Emergency Collision Avoidance
Pengfei Lin, and M. Tsukada
IEEE International Conference on Robotics and Automation (ICRA) 2022 | In Proceeding for Publication | Philadelphia (PA), USA - Local Path Planning Using Artificial Potential Field for Waypoint Tracking with Collision Avoidance
Pengfei Lin, W. Y. Choi, and C. C. Chung
IEEE International Conference on Intelligent Transportation Systems (ITSC) 2020 | paper | Rhodes, Greece - Waypoint Tracking for Collision Avoidance Using Artificial Potential Field
Pengfei Lin, W. Y. Choi, J. H. Yang, and C. C. Chung
Chinese Control Conference (CCC) 2020 | paper | Shenyang, China - Model Predictive Path Planning Based on Artificial Potential Field and Its Application to Autonomous Lane Change
Pengfei Lin, W. Y. Choi, S. H. Lee, and C. C. Chung
International Conference on Control, Automation and Systems (ICCAS) 2020 | paper (Student Best Paper Award Finalists) | Busan, Korea - Path-Planning for Intelligent Vehicles Based on Virtual Potential Function under Multi-obstacles
Pengfei Lin, S. H. Lee, and C. C. Chung
IEEE International Conference on Control Automation (CACS) 2020 | paper | Hsinchu, Republic of China - Intelligent Vehicle for Collision Avoidance Using Artificial Potential Field with Speed Variation
Pengfei Lin, W. Y. Choi, and C. C. Chung
Korean Society of Automotive Engineers (KSAE) 2020 | paper (Best Paper Award) | Samcheok, Korea - Autonomous Lane Change System for Intelligent Vehicle Based on Model Curve Fitting
Pengfei Lin, W. Y. Choi, and C. C. Chung
Korean Society of Automotive Engineers (KSAE) 2020 | paper | Jeju Island, Korea - Autonomous Driving Using Artificial Potential Function for Vehicle Collision Avoidance
Pengfei Lin, J. H. Yang, W. Y. Choi, and C. C. Chung
Institute of Control, Robotics and Systems (ICROS) 2020 | paper | Sokcho, Korea
Journal Papers:
- Model Predictive Path-Planning Controller with Potential Function for Emergency Collision Avoidance on Highway Driving
Pengfei Lin, and M. Tsukada
IEEE Robotics and Automation Letters (RA-L) with ICRA 2022 Option | paper (Regular Paper) - Potential Field-based Path Planning for Emergency Collision Avoidance with a Clothoid Curve in Waypoint Tracking
Pengfei Lin, J. H. Yang, Y. S. Quan, and C. C. Chung
Asian Journal of Control (AJC) | paper (Special Issue ) | Top Downloaded Article - Safety Tunnel-Based Model Predictive Path-Planning Controller with Potential Functions for Emergency Navigation
Pengfei Lin, Y. S. Quan, J. H. Yang, C. C. Chung, and M. Tsukada
IEEE Transactions on Intelligent Transportation Systems (T-ITS) | paper (Regular Paper) - Clothoid Curve-based Emergency-Stopping Path Planning with Adaptive Potential Field for Autonomous Vehicles
Pengfei Lin, E. Javanmardi, and M. Tsukada
IEEE Transactions on Vehicular Technology (T-VT) | paper (Regular Paper) - Fostering Fuzzy Logic in Enhancing Pedestrian Safety: Harnessing Smart Pole Interaction Unit for Autonomous Vehicle-to-Pedestrian Communication and Decision Optimization
V. Chauhan, C. M. Chang, E. Javanmardi, J. Nakazato, Pengfei Lin, T. Igarashi, and M. Tsukada
MDPI Electronics | paper (Regular Paper) - Zero-Knowledge Proof of Traffic: A Deterministic and Privacy-Preserving Cross Verification Mechanism for Cooperative Perception Data
Y. Tao, E. Javanmardi, Pengfei Lin, Y. Jiang, J. Nakazato, M. Tsukada, and H. Esaki
IEEE Access | paper | Regular Paper - HDR Image Processing Algorithm for Portrait Based on Multi-feature Fusion
C. Wu, Y. Zhang, Z. Lin, T. Guo, Pengfei Lin, and J. Lin
Chinese Journal of Liquid Crystals and Displays | In Proceeding for Publication | Regular Paper